























Why Coreless DC Motors Win in Battery-Powered Medical Devices
-
 2026.06.11
2026.06.11
-
Technology



Coreless DC motors win in battery-powered medical devices because their ironless rotor delivers 80–90% efficiency, near-zero cogging, and low vibration — see the full lineup of ironless coreless motors available. For insulin pumps, surgical drills, infusion devices, and handheld diagnostics, that combination directly translates into longer battery life, smoother dosing, and quieter operation. The trade-off is cost, but in medical applications where reliability and precision are non-negotiable, the math almost always favors coreless. For applications outside the medical field, see our broader guide to when the extra cost of a coreless DC motor is actually justified.
The Core Reason: An Ironless Rotor Changes the Energy Equation
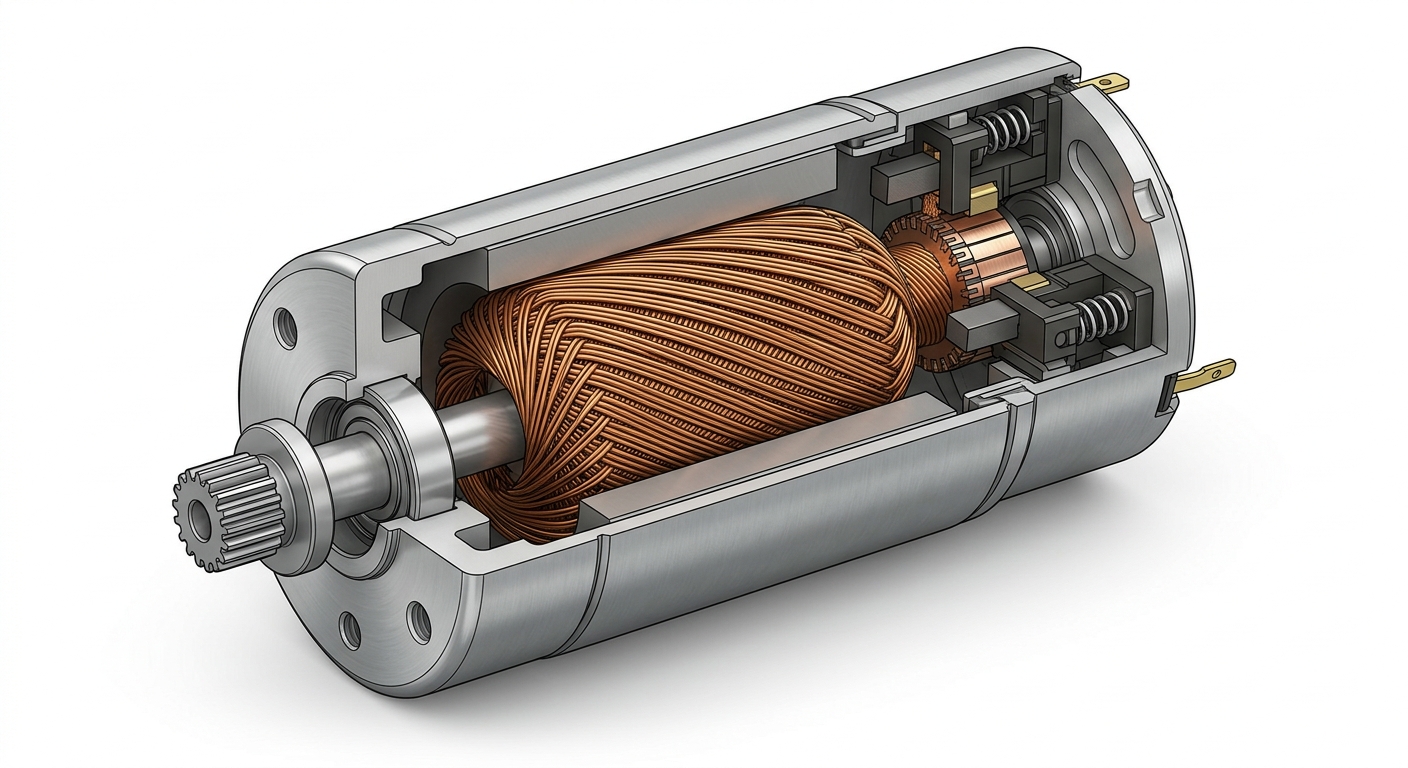
Strip the iron laminations out of the rotor and something interesting happens — the motor stops wasting energy on itself. A coreless DC motor uses a self-supporting, skew-wound copper coil as the rotor, with no iron core to magnetize and demagnetize thousands of times per second.
That single design choice eliminates iron losses, kills cogging torque, and slashes rotor inertia by roughly an order of magnitude compared to an iron-core brushed motor of the same diameter. For a Ø10 mm coreless motor, rotor inertia might be 0.3 g·cm² versus 3–5 g·cm² for an equivalent iron-core version.
Why does that matter for a battery-powered medical device? Because every milliamp the motor doesn't waste on internal losses is a milliamp that stays in the lithium cell. Real-world bench data from infusion pump prototypes regularly shows 25–40% longer runtime when swapping a standard brushed micro motor for a coreless equivalent — without changing the battery.
Battery Life: Where Coreless Motors Quietly Dominate
Battery life in a medical device is rarely about the battery — it's about what's pulling current from it. A typical Ø8 mm coreless motor might draw 15–25 mA at no load and 80–120 mA under typical infusion loads. A comparable iron-core brushed motor? Often 3–4x higher across the same operating points.
For a wearable insulin patch pump running on a single CR2032 (~225 mAh), that difference decides whether the patient gets 3 days or 5 days of use per battery. The same logic applies to portable nebulizers, ambulatory ECG patches, and PCA pumps.
Two specs to verify on the datasheet before committing:
- No-load current — directly correlates with standby drain.
- Efficiency at the operating point — not peak efficiency. Most medical loads run at 20–40% of rated torque, so check the curve there.
For more on which specs actually matter at the buying stage, our guide on torque and speed specs to check before buying a motor walks through the full checklist.
Precision Dosing: Low Inertia Means Faster, Cleaner Stops
Here's a problem that ruins infusion accuracy — overshoot. When a motor commands a stop, the rotor wants to keep spinning. Iron-core rotors carry enough inertia to coast past the target position by tens of microsteps, which in an insulin pump translates to a dosing error you really don't want.
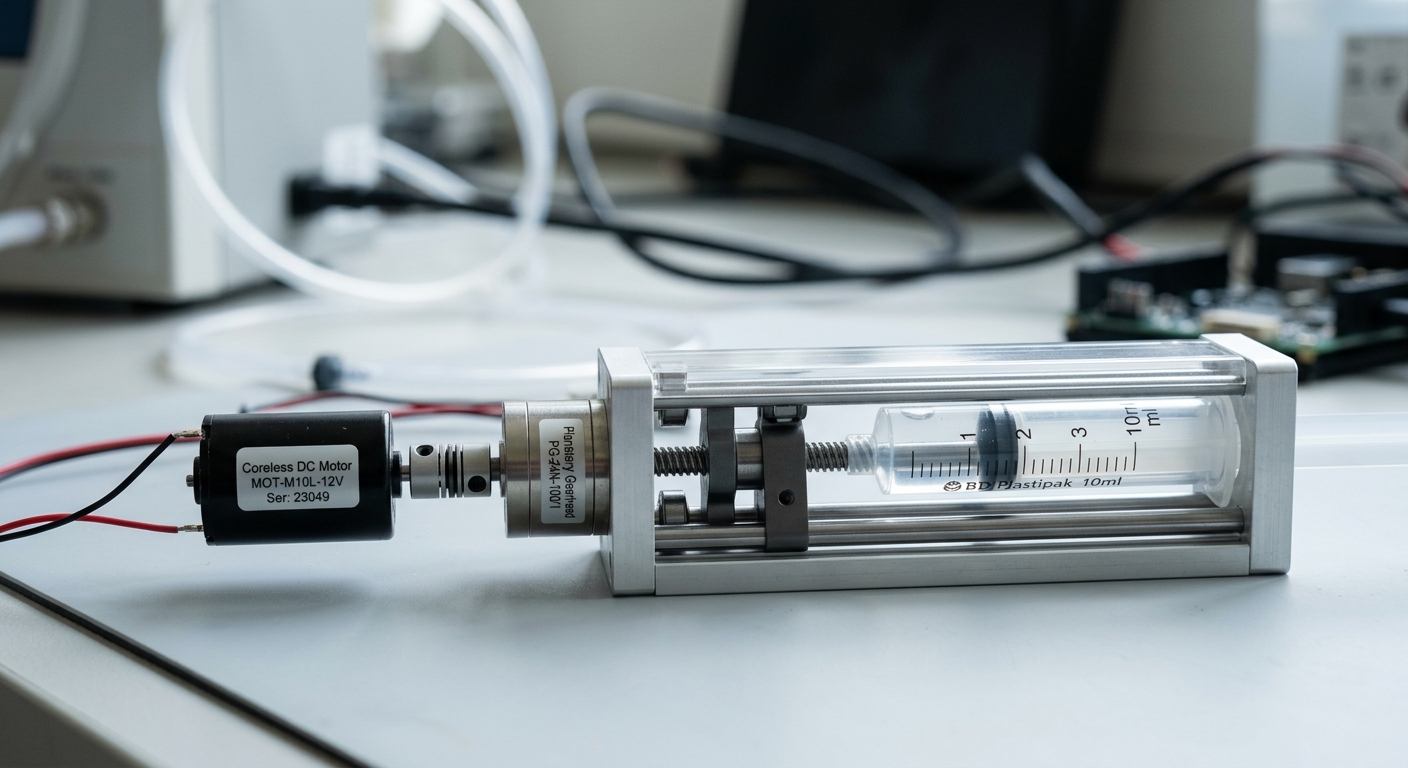
Coreless motors have a mechanical time constant typically between 5 and 15 ms. That means they accelerate and decelerate almost instantly relative to control loop timing. Combine a coreless motor with a compact planetary gearhead and a magnetic encoder, and you get sub-microliter dose resolution without complex motion profiling.
For example, a portable syringe pump using a Ø13 mm coreless motor with a 256:1 planetary gearbox and a 12 CPR encoder can reliably deliver 0.05 µL increments — a target that's effectively impossible with an iron-core rotor of the same size due to settling oscillation.
Quiet Operation: Why Patients Notice (Even If They Don't Mention It)
A motor whining at 3 a.m. next to a sleeping patient is a real product complaint. Cogging torque — the magnetic “notchiness” an iron-core rotor produces as it passes the stator poles — is the biggest contributor to audible motor noise in small devices.
Coreless motors have no iron in the rotor, so cogging is essentially zero. The torque ripple drops to a smooth ~2–3% versus 15–25% in a typical iron-core brushed motor. Bench measurements on wearable pumps regularly show 8–15 dB lower noise floor at one meter when switching to coreless.
This matters most in:
- Sleep apnea CPAP humidifier valves
- Wearable insulin and hormone delivery patches
- Hearing aid auto-fit micro-actuators
- Bedside drug delivery pumps
Thermal Behavior: Cool Running in Sealed Enclosures
Medical devices are usually sealed. That means heat has nowhere convenient to go. A motor running at 70% efficiency in a sealed housing dumps roughly twice the waste heat of one running at 85% — and that heat changes the device's behavior over a long treatment cycle.
Coreless motors run cooler for two reasons: higher efficiency, and the absence of iron-core eddy current losses that would otherwise heat the rotor from the inside out. In practical terms, a coreless motor in continuous duty inside an IP67-rated handheld might stabilize at 15–20°C above ambient, where an iron-core equivalent would push 35–45°C.
That thermal margin gives engineers headroom to use smaller heat-sinking structures, simpler enclosures, and lower-cost plastics. If your motor is overheating in a sealed product, it's worth reading our breakdown of why micro gear motors overheat and how to fix it before redesigning the housing.
Real-World Example: A Handheld Surgical Driver
Consider a battery-powered orthopedic screwdriver used in arthroscopic procedures. The OEM's original design used a Ø16 mm iron-core brushed motor with a 64:1 planetary gearhead. The complaints from the field were predictable: 12-minute battery life mid-procedure, noticeable warmth in the handpiece grip after 5 minutes of continuous use, and a noticeable “chatter” at low speeds when starting a screw.
The fix was a Ø16 mm coreless brushed motor with the same gearbox footprint and a Hall-effect encoder for closed-loop torque control. Results from the redesign:
- Battery runtime per charge: 12 min → 21 min
- Handpiece grip temperature after 5 min: 41°C → 31°C
- Low-speed start: smooth, no perceptible chatter
- Torque accuracy at the screw head: ±18% → ±6%
The bill of materials cost rose by about $4 per unit. The customer accepted it without negotiation because the warranty return rate dropped by an estimated 40% in the first year.

Pairing With the Right Gearbox and Encoder
A coreless motor alone rarely solves a medical motion problem — the gearbox and feedback choice matter just as much. The general rules:
Gearbox selection
- Planetary gearheads — first choice for high torque density and low backlash (typically 1–3°). Ideal for syringe and infusion pumps.
- Spur gearheads — lower cost, acceptable for non-critical dosing or valve actuation.
- Worm gearheads — only when self-locking is required, e.g. positioning that must hold without power.
If you want a deeper comparison, see our practical breakdown of planetary vs spur vs worm gearboxes for compact designs.
Encoder selection
- Magnetic Hall encoders — robust, low power (~3 mA), 8–24 CPR is usually enough for dosing.
- Optical encoders — higher resolution but draw 20–40 mA, often too thirsty for battery-only devices.
And if your application has unusual geometry — a curved housing, an off-axis output, or an extreme reduction ratio — that's typically when a custom gearbox makes more sense than a standard motor.
Where Coreless Isn't the Right Answer
Let's be honest — coreless isn't always the winner. The ironless coil has a lower thermal mass, which means it heats up faster under overload. Run a coreless motor above its rated current for more than a few seconds and you can literally desolder the coil from the commutator. There's no iron mass to absorb the spike.
Skip coreless when:
- The application has frequent stall conditions or impulsive overloads (e.g. a power tool that gets jammed).
- Service life needs to exceed 5,000 hours of continuous duty — brush wear becomes the limiter, and a small BLDC is usually better. Our brushed vs brushless comparison covers when to make that jump.
- Budget is the dominant constraint and the device runs from wall power — a standard brushed motor often does the job for half the cost.
For medical applications specifically, the only common case where we'd recommend against coreless is when the device is line-powered and runs intermittently — in that case the efficiency advantage rarely justifies the price premium.
Quick Selection Checklist for Medical OEMs
If you're sizing a coreless DC motor for a battery-powered medical product, run through these before sending an RFQ:
- Battery chemistry and capacity — defines your current budget.
- Duty cycle — continuous, intermittent, or burst? Coreless excels at intermittent.
- Operating torque (not peak) — size the motor 30–50% above the operating point, not the peak.
- Audible noise target — if <30 dB at 1 m is required, coreless is almost mandatory.
- Sterilization method — autoclave-compatible motors need specific seals and bearing greases.
- Encoder requirements — closed-loop dosing needs at least 8 CPR, ideally 16–24.
- Regulatory environment — IEC 60601 compliance affects insulation and creepage; specify it up front.
Get those seven items locked down and supplier conversations move quickly. Skip them and expect three rounds of clarification emails.
Bringing It All Together
Coreless DC motors win in battery-powered medical devices because every characteristic of an ironless rotor — high efficiency, low inertia, low cogging, low EMI, low audible noise — happens to be exactly what medical engineering teams care about. The cost premium is real but usually small relative to the value of longer battery life, quieter operation, and better dosing accuracy.
If you're working on an insulin pump, a portable diagnostic, a surgical handpiece, or any other compact device where the motor sits between a battery and a patient, coreless deserves to be the default starting point — with iron-core or BLDC considered only when a specific constraint pushes you elsewhere.
Need help matching a coreless motor and gearbox combination to your medical product? Talk to our engineering team with your duty cycle, torque, and footprint targets, or browse our compact motor catalog to see what's available off the shelf before you spec a custom build.







