























Planetary vs Spur vs Worm Gearboxes: A Practical Comparison for Compact Designs
-
 2026.06.08
2026.06.08
-
Buying Guides



For most compact motor designs, the choice comes down to this — and if you already know you want the straight-cut option, see our full spur gear motor range: pick a planetary gearbox when you need maximum torque in a coaxial package, pick a spur gearbox when cost and efficiency matter more than torque density, and pick a worm gearbox when you need a right-angle output or self-locking behavior. Each type has a clear sweet spot — and choosing the wrong one usually shows up as overheating, premature wear, or a product that’s twice as expensive as it needed to be.
The 30-Second Decision Framework
Before we dig into the details, here’s the shortcut most engineers use when sizing a compact gear motor:
- Need high torque in a small coaxial footprint? Planetary.
- Need a cheap, quiet, efficient drive for light loads? Spur.
- Need a 90° output, or want the load to hold position when power is off? Worm.
That covers maybe 80% of compact motor selections. The other 20% is where the real engineering happens — duty cycle, backlash tolerance, noise targets, and lifetime. We’ll walk through all of it below, but if you’re still unsure after reading, our torque and speed spec checklist is a solid second step.
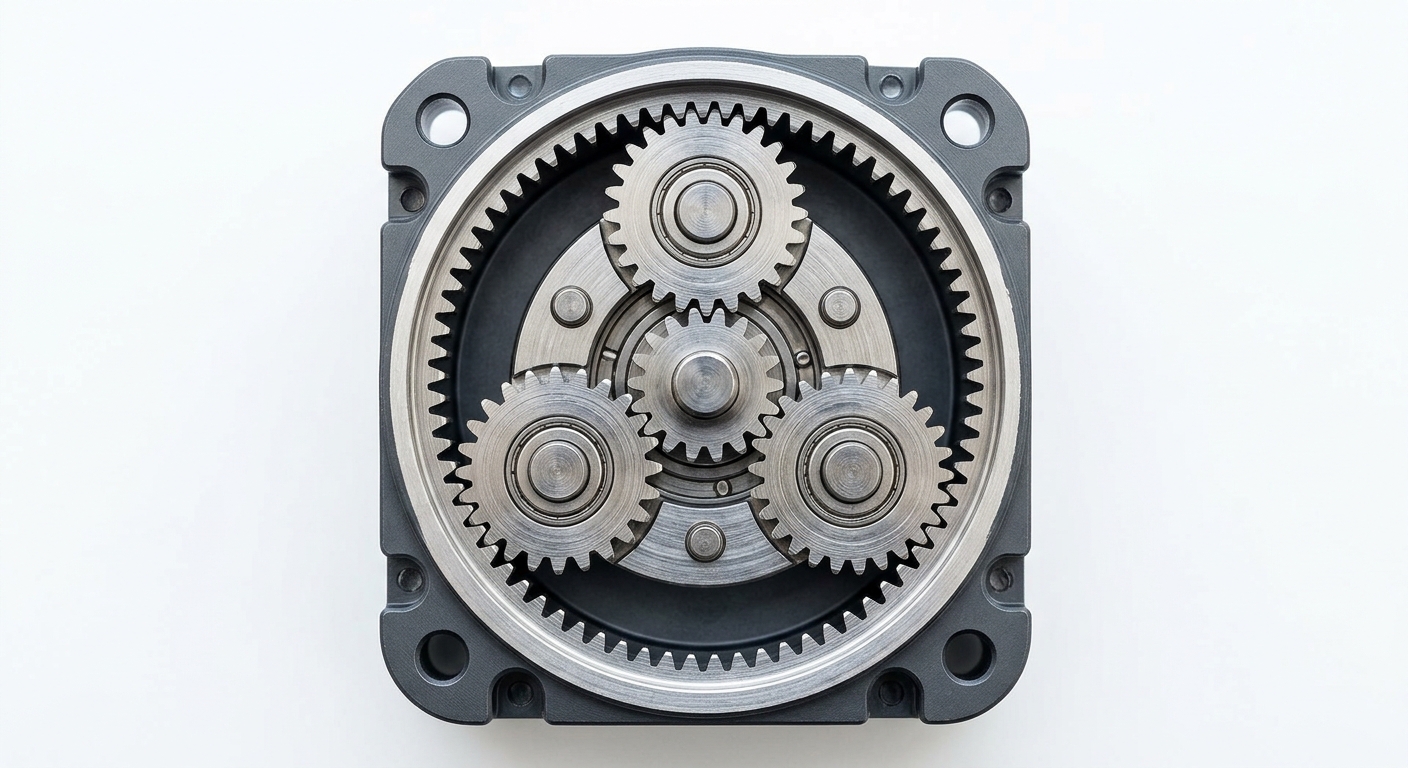
Planetary Gearboxes: Torque Density Champions
A planetary gearbox splits the load across three or four planet gears orbiting a sun gear inside a ring gear. That load-sharing is the secret — it’s why a 16 mm planetary gearhead can output 2–5 Nm continuously when a spur gearhead the same size barely manages 0.5 Nm.
Where they shine
Robotics joints, electric grippers, surgical tools, camera gimbals, and compact linear actuators. Anywhere you need torque, low backlash, and an inline shaft, planetary is the default answer.
Real-world example
A medical device OEM building a portable infusion pump came to us needing 1.2 Nm at 30 RPM in a 12 mm diameter package, running on 6 V. A spur gearhead would have needed at least 16 mm OD to hit that torque reliably. A two-stage 12 mm planetary at 64:1 dropped the package straight into their housing — same motor frame, same shaft height, half the volume.
The trade-offs
Planetary gearboxes cost more (typically 2–4× a spur equivalent), and multi-stage planetaries can get noisy above 4,000 RPM input speed. Backlash on a standard miniature planetary runs 1–3°; low-backlash versions can hit 15 arcmin or better but at a premium.
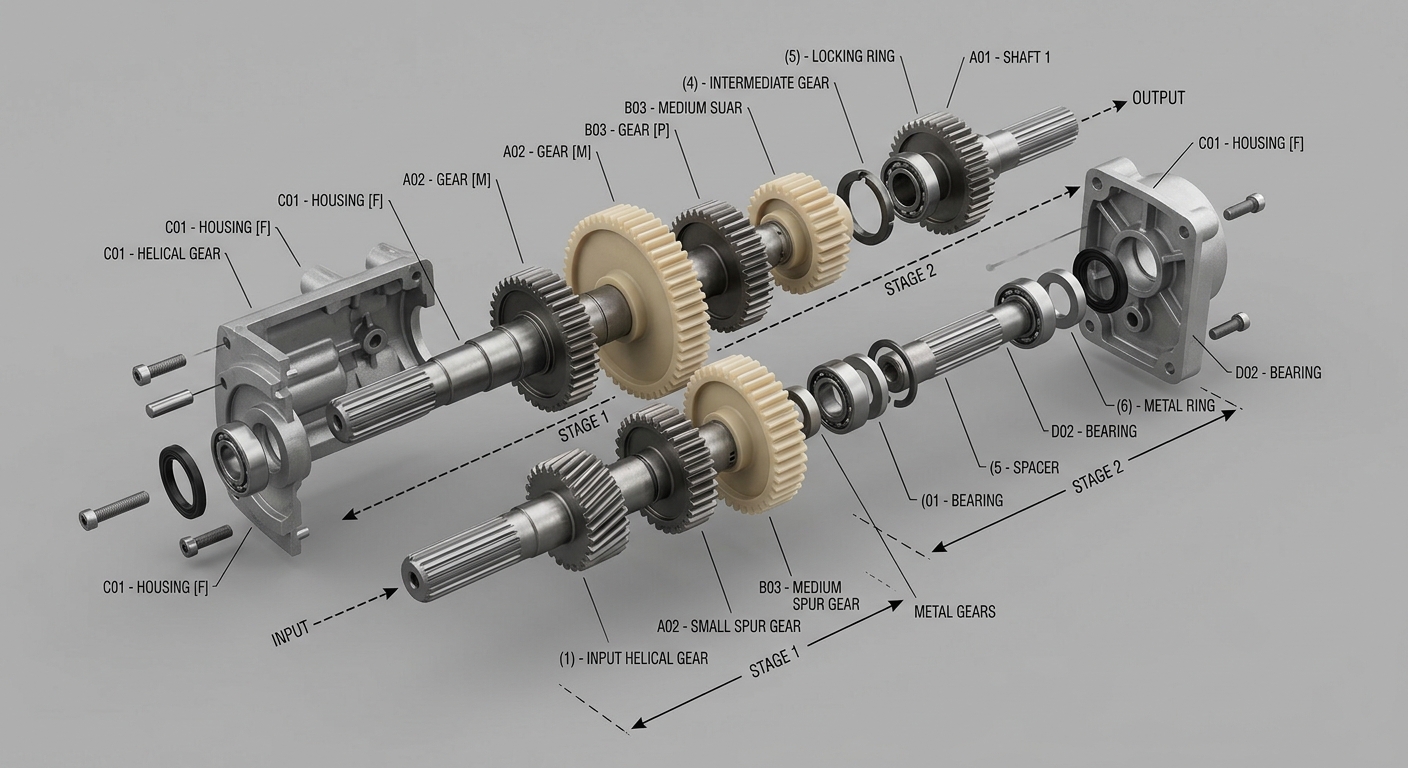
Spur Gearboxes: The Cost-Effective Workhorse
Spur gears are the simplest gear type — straight-cut teeth on parallel shafts. In a multi-stage compact spur gearhead, you typically see 2–5 stages stacked to reach ratios from 10:1 up to about 1,000:1.
Why they’re still everywhere
Efficiency. A single spur stage runs 92–98% efficient, so even a 4-stage 300:1 spur train can hit 80%+ overall. Combine that with low part cost — plastic or sintered metal gears, no preloading — and you get the gearbox that powers most of the everyday devices in this hidden world of mini gear motors: electric toothbrushes, soap dispensers, smart locks, vending machine slot drives, automated blinds.
Where they fall short
Torque capacity is limited because only one or two teeth carry the load at a time. Push a 16 mm spur gearhead past 0.8–1 Nm and you’ll start chewing teeth — especially with shock loads. Backlash is also higher than planetary, typically 1–3° per stage, which stacks up fast in multi-stage designs.
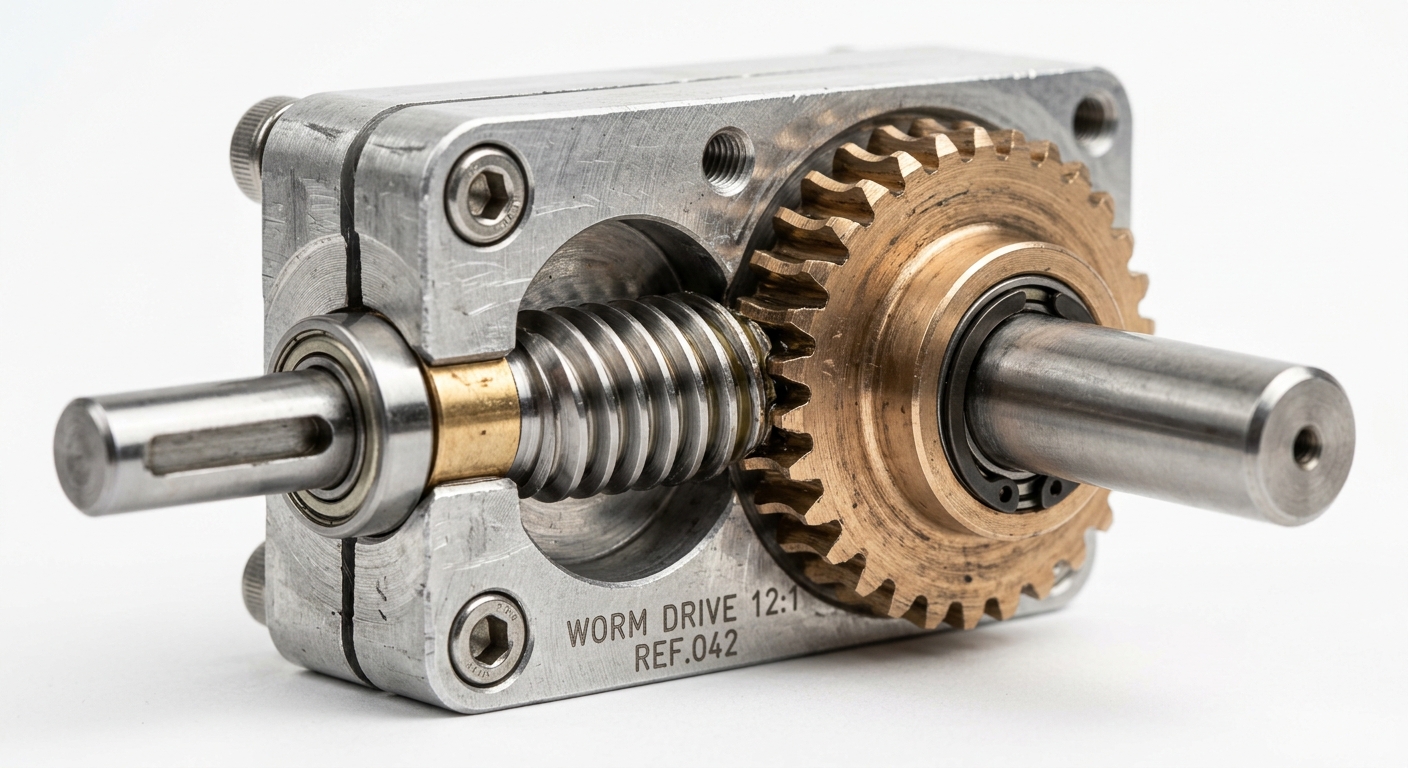
Worm Gearboxes: Right-Angle and Self-Locking
A worm gearbox uses a screw-like worm meshing with a worm wheel to deliver power at a 90° angle. The geometry gives you two things no other compact gearbox can: a right-angle output in a single stage, and self-locking once the lead angle gets shallow enough (generally ratios above 30:1).
Where self-locking matters
Anywhere the load shouldn’t back-drive when power is cut. Electric door locks, window lifts, valve actuators, camera tilt heads, and small lift mechanisms all rely on worm gears so the motor doesn’t have to hold position electrically. That saves power and prevents drift.
The efficiency penalty
Sliding friction between the worm and wheel kills efficiency. A 50:1 worm stage might only deliver 50–65% efficiency — sometimes worse with high ratios. That heat has to go somewhere, which is why worm gear motors are more prone to overheating in continuous-duty applications. Stick to intermittent duty (S2/S3) where possible, or oversize the motor.
Comparison at a glance
| Criteria | Planetary | Spur | Worm |
|---|---|---|---|
| Torque density | Highest | Moderate | High |
| Efficiency / stage | 90–96% | 92–98% | 40–85% |
| Noise | Low–moderate | Moderate | Low |
| Backlash | Low | Moderate | Moderate–high |
| Self-locking | No | No | Yes (high ratio) |
| Shaft orientation | Inline | Inline/parallel | Right-angle |
| Cost | $$$ | $ | $$ |
Matching the Gearbox to the Load Profile
Forget the marketing specs for a minute. The load profile — continuous vs intermittent, steady vs shock, bidirectional vs single-direction — is what really decides which gearbox survives.
- Continuous steady load (fans, pumps, conveyors): Spur or planetary. Worm only if you can manage the heat.
- Intermittent high torque (locks, grippers, actuators): Planetary or worm. Worm gives you the bonus of holding position with no current.
- Frequent reversing (robotics joints, pan-tilt): Planetary. Worm hates reversing under load — wear accelerates fast.
- Shock loads (power tools, impact mechanisms): Planetary with hardened steel gears. Spur teeth shear; worm threads gall.
One mistake we see often: engineers spec a worm gearbox for a continuous-duty conveyor because they like the self-locking feature, then call us six months later asking why the motor runs at 90°C. Self-locking is great. 50% efficiency at 100% duty cycle is not.
Size, Weight, and Mounting Constraints
In compact designs, physical envelope often decides the gearbox before any other spec does. Here’s what to think about:
Inline vs right-angle
Planetary and spur gearheads keep the motor and output on the same axis. That’s ideal for cylindrical products — handheld devices, pen-style instruments, in-line actuators. Worm gives you a right-angle, which is gold when you need to fit a motor sideways into a flat product like a smart lock or a slim camera mount.
Diameter vs length
Planetary gearheads tend to be short and fat — typically 1.5–2.5× their diameter in length per stage. Spur gearheads are longer and thinner because the stages sit side by side or stacked offset. If your enclosure is long and narrow, spur wins; if it’s short and round, planetary fits better.
Output shaft loading
Worm output shafts handle high radial loads well because the worm wheel is supported on both sides. Planetary outputs handle axial loads beautifully thanks to the symmetric planet carrier. Spur outputs are the weakest of the three for radial loads — plan for an external bearing if you’re driving a pulley or pinion directly.

Noise, Backlash, and Precision Considerations
If your product sits on a desk or near a patient, noise matters. If your product positions something precisely, backlash matters — which is why component-level precision gears are as important as gearbox topology. They’re rarely the same problem, but they often push you toward the same answer.
Noise ranking (quietest first)
- Worm — sliding contact is inherently quiet, often under 45 dB at 1 m.
- Planetary with helical gears — quiet, but adds cost.
- Planetary with spur-cut gears — moderate whine at high RPM.
- Multi-stage spur — loudest, especially with plastic gears at high speed.
Backlash ranking (tightest first)
- Low-backlash planetary — 3–15 arcmin achievable.
- Standard planetary — 1–3°.
- Worm — 1–3°, but doesn’t worsen much over life.
- Multi-stage spur — backlash stacks, easily 4–8° total.
For closed-loop applications using an encoder, backlash matters less because the controller compensates — but only if the encoder is on the output side, not the motor side. If you’re building a positioning system, that detail alone can flip your gearbox choice.
Cost, Lead Time, and Sourcing Reality
Datasheets don’t tell you about the supply chain. In practice:
- Spur gearheads are the cheapest and most available. Off-the-shelf 6–16 mm spur gear motors ship in days, and tooling for custom ratios is inexpensive.
- Worm gearboxes sit in the middle. The worm itself is cheap to make, but the worm wheel often uses bronze or specialized polymer, which can stretch lead times.
- Planetary gearheads cost the most and have the longest lead times when you need low-backlash or custom ratios. Standard 12–22 mm metric planetaries are widely stocked, though.
For early-stage prototypes, start with whatever standard gearhead gets you 80% of the way there. Once the mechanical concept is validated, you can switch to a custom gearbox for the exact ratio, shaft length, or mounting flange you need. We see plenty of OEMs waste months designing around an exotic gearhead they didn’t actually need.
Pairing the Gearbox with the Right Motor
The gearbox is only half the equation. The motor on the input side has to match too — and the right combination usually depends on duty cycle, control method, and budget.
- Brushed DC + spur — the cheapest combo, perfect for low-cost consumer devices and light intermittent use.
- Brushed DC + planetary — common in power tools, electric locks, and hobby robotics where torque matters more than lifespan.
- BLDC + planetary — the gold standard for medical, robotics, and any long-life precision application. More on the trade-offs in our brushed vs brushless guide.
- Coreless DC + planetary — when you need fast response, low inertia, and smooth low-speed motion (camera focus, syringe pumps).
- Stepper + planetary — for open-loop positioning with high holding torque, like 3D printer feeders or lab automation.
- BLDC or brushed + worm — for anything that needs to hold load without power.
If you’re still mapping out which motor family fits your design, our DC motor types guide walks through it in detail.
Putting It All Together
Most compact-design gearbox decisions come back to three questions: how much torque in how small a package, what shaft orientation, and does the load need to hold itself when power drops? Answer those three and you’ve narrowed it to one or two candidates. Then layer in duty cycle, noise, backlash, and budget to make the final call.
If you’re working through a real design and want a second opinion on the gearbox-motor pairing, send us your torque, speed, voltage, and envelope constraints — we’ll suggest a few configurations from our compact motor and gearbox lineup, or quote a custom build if you need something off-catalog. Reach out anytime through our contact page.









