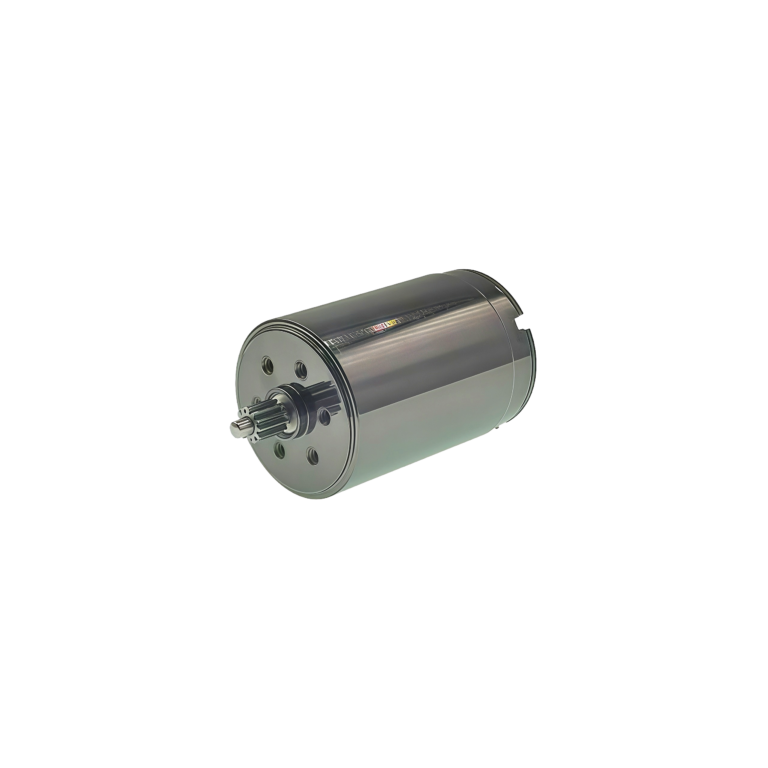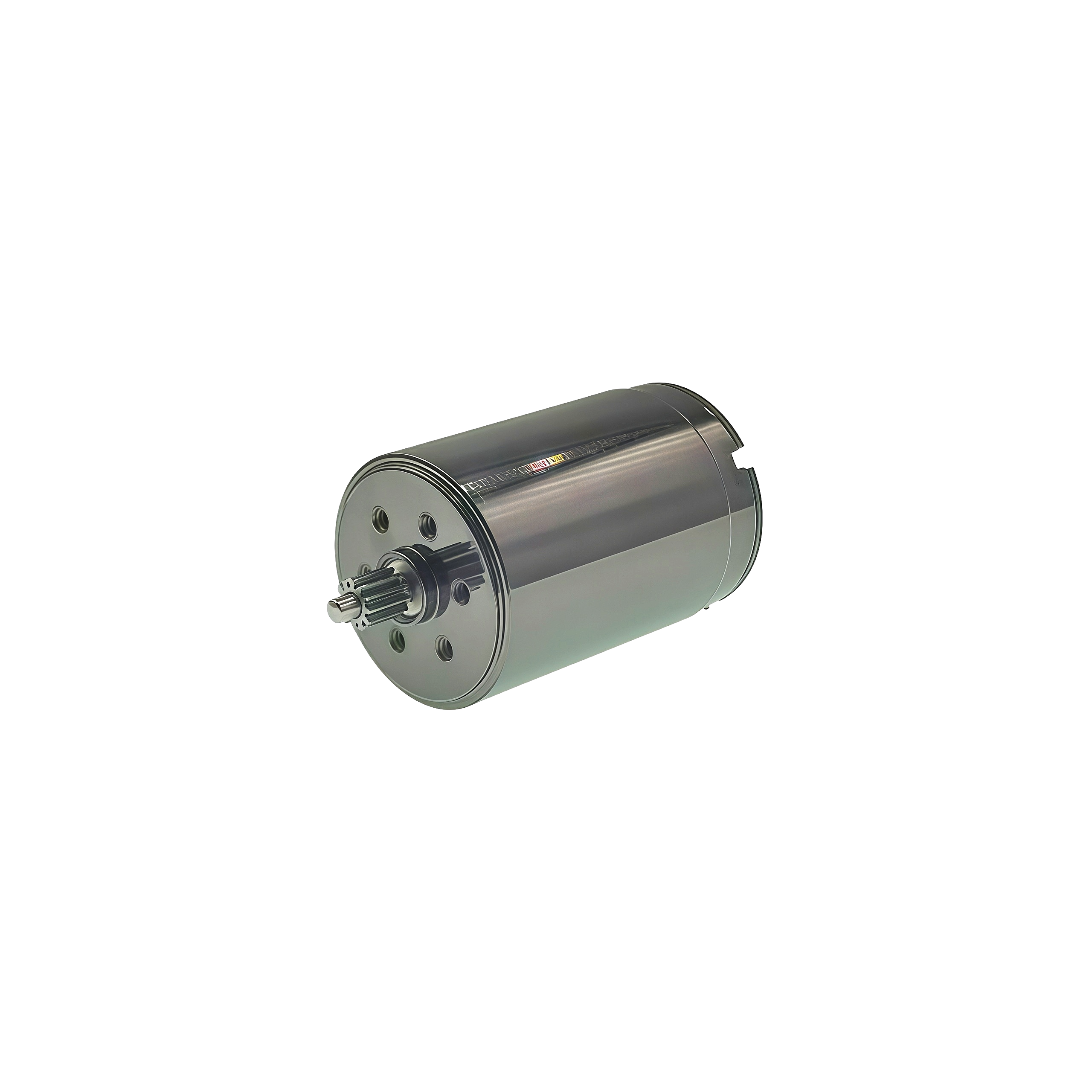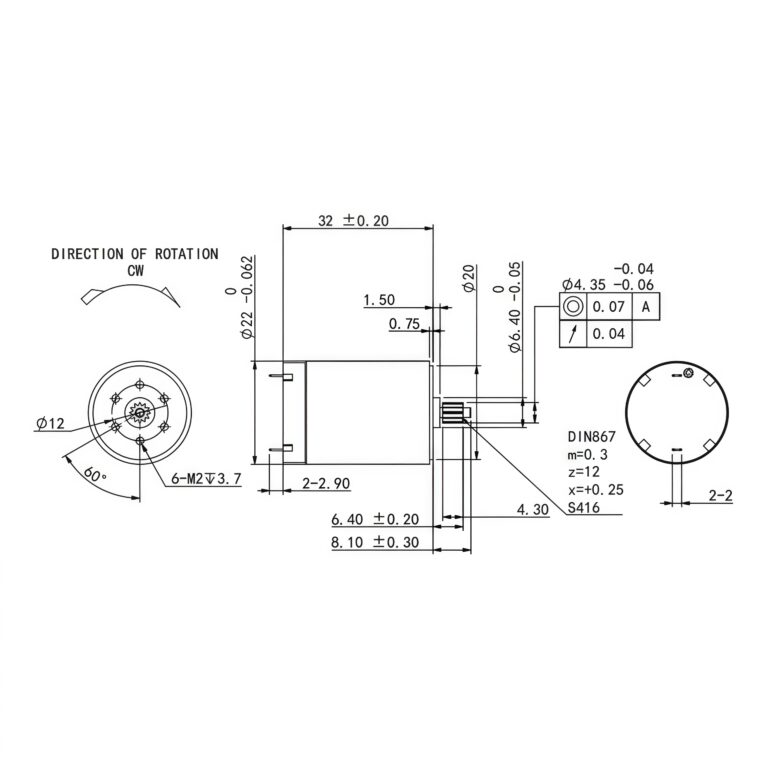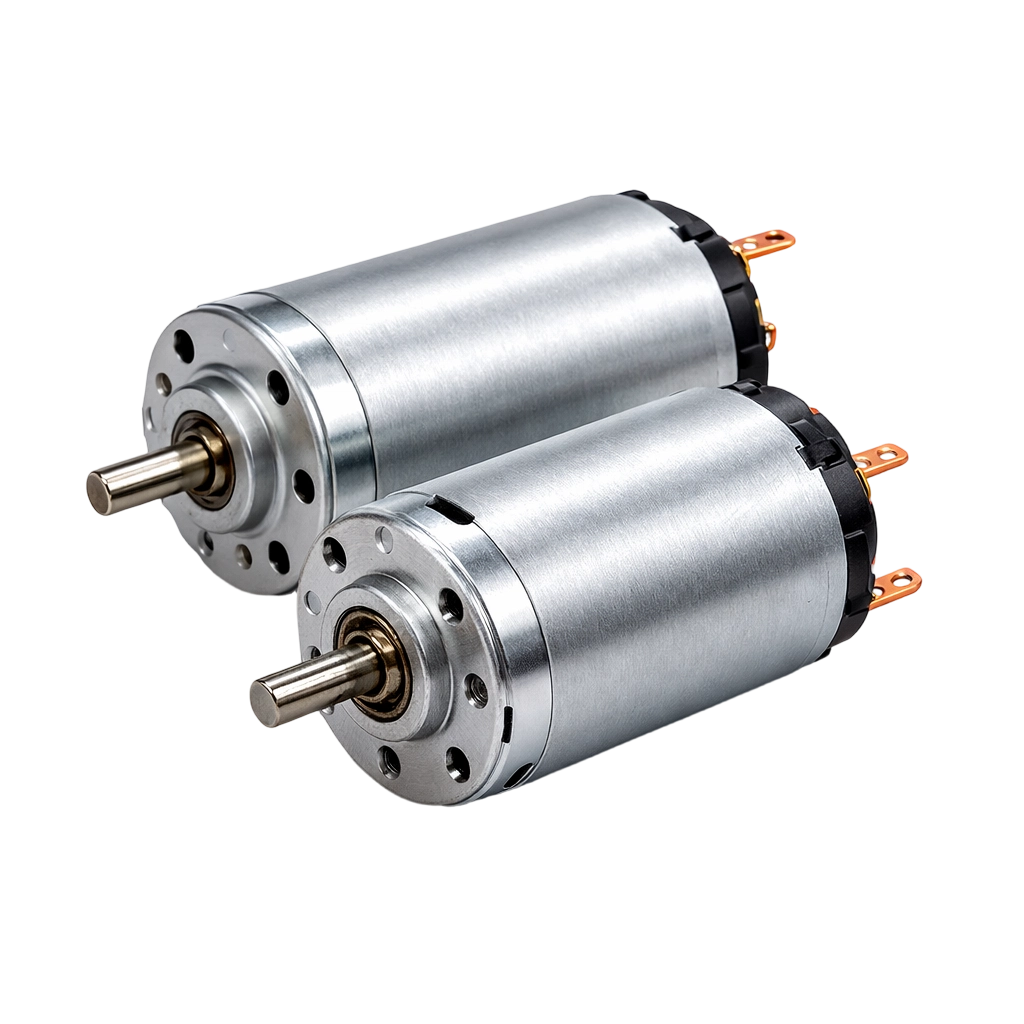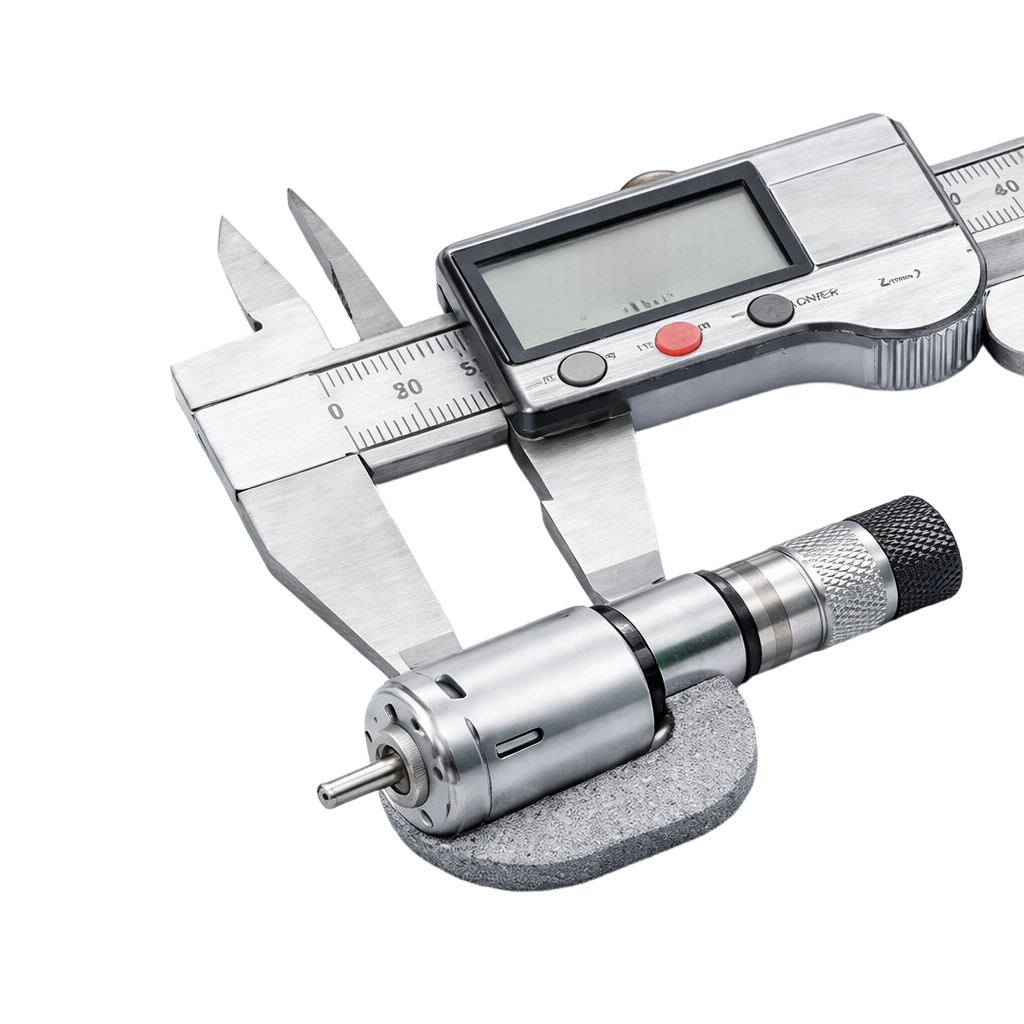

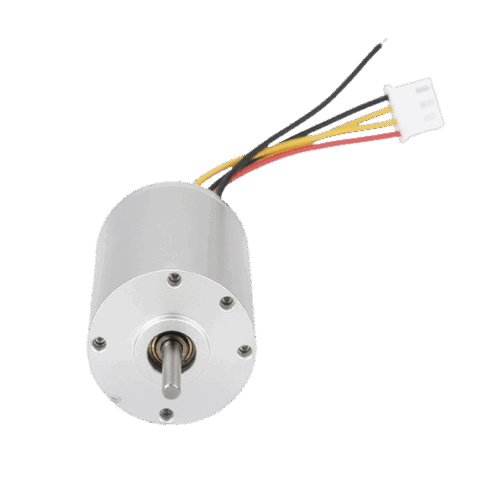

















22mm Diameter DC Brushed Coreless Motor
This 22mm brushed coreless DC motor is designed for 6–24V systems where you anchor selection to a 24V configuration with defined “MAX” current limits, balancing a 5.7k rpm rated-speed target and a 2.0A stall boundary.